鹿島建設與速霸陸(Subaru)在大阪市的協助下,於通往2025年日本國際博覽會會場的高速公路上,鋪設了內含光纖感測纜線的瀝青路面,並啟動利用光纖感測技術的路車協調型自動駕駛實證實驗。
鹿島建設與速霸陸(Subaru)啟動利用光纖技術的路車協調型自動駕駛實證實驗
鹿島建設與速霸陸(Subaru)已啟動利用光纖感測技術的路車協調型自動駕駛實證實驗。
這項舉措旨在實現未來移動社會中更安全的道路基礎設施,並致力於減少交通事故的發生。
這項舉措旨在實現未來移動社會中的安全道路基礎設施,並致力於減少交通事故的發生。
兩家公司在2025年日本國際博覽會(大阪・關西萬博)會場的聯外道路——阪神高速道路淀川左岸線海老江路段,在大阪市的協助下,於瀝青鋪裝層內部鋪設了光纖感測纜線。
在這一區段中,將運行接駁巴士及實驗車輛,並透過感測因車輛行駛所產生的振動與變形(應變),進行數據偵測與測量,藉此達成有助於道路與交通管理的監控功能。
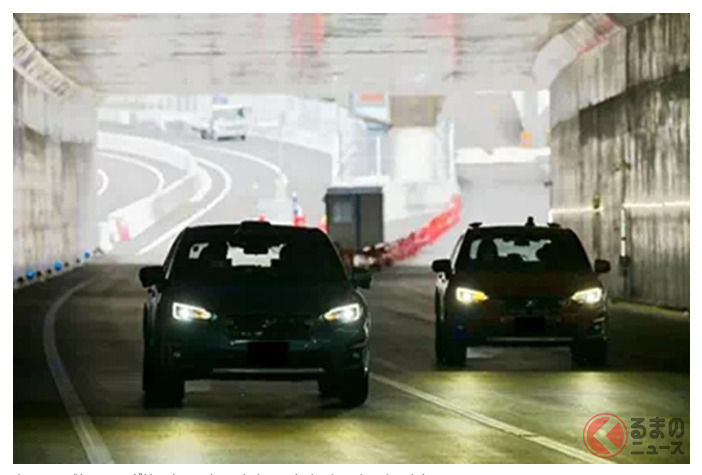
本次實證實驗的重點,在於將透過道路監控即時取得的車輛位置資訊,與自動駕駛車輛進行共享,使其能在車輛定位困難的隧道內實現安全匯入的運行情境,從而驗證「路車協調型自動駕駛」的技術可行性。
無論是在測試場地,還是實際高速公路上,利用光纖感測技術進行的路車協調型自動駕駛實證實驗,此舉均為日本首創。
鹿島建設與速霸陸的共同研究自2024年9月展開。
研究地點選在北海道中川郡美深町的「速霸陸美深測試場」——該場地擁有模擬高速公路環境的環形試驗跑道。雙方將鹿島的光纖感測技術,與速霸陸技術研究所的路車協調型自動駕駛技術進行整合,展開合作研究。
本研究於嚴寒環境下進行,以測試低延遲且高精度的道路端數據通訊對路車協調型自動駕駛的支援效果。在取得初步成果後,雙方活用阪神高速道路所設立的「溝通型產學研聯合研究制度」,自2024年12月起啟動以「利用光纖感測技術支援自動駕駛的道路基礎設施技術」為主題的實證實驗。
 アスファルト舗装内部へ光ファイバを敷設する様子
アスファルト舗装内部へ光ファイバを敷設する様子
鹿島建設的光纖感測技術,為道路基礎設施的狀態監控帶來了全新的可能性。
透過鋪設在瀝青路面內部的光纖感測纜線,可以即時偵測並測量車輛行駛所造成的振動與變形(應變)。
應用此技術,不僅能監控道路狀況,還能精準掌握車輛的位置資訊。
特別是在 GPS 等定位系統難以發揮作用的隧道內進行車輛位置偵測方面,這項技術有望解決以往難以克服的問題。
對於這次的實證計畫,鹿島建設表示:「本公司秉持『承襲人們的心願與技術,透過創意與感動實現想像』的願景聲明,將以開放性、多樣性與主動性為原則,持續投入為社會基礎設施創造新價值的研究開發。」
另一方面,速霸陸則指出:「本公司基於『全方位安全』的理念,持續強化安全性能,目標是在2030年前實現交通事故零死亡。未來也將持續致力於降低事故率,並實現我們所承諾的價值——『安心與愉悅的駕駛體驗』。」
原文出處:日本初!鹿島建設とスバル、光ファイバ活用の自動運転実証を開始!安全な道路インフラの実現へ
原文記者:くるまのニュース編集部
原文圖庫:https://kuruma-news.jp/photo/921548
想看更多:KURUMAのNEWS (https://kuruma-news.)